The First Phase Measuring Interferometer at Bell Labs
At Photonics West we introduced a new product, upgrading Zygo® GPI™ and Mark IV™ interferometers. This also includes the VeriFire™ line of interferometers. All these system are basically the same with minor variations and which we can accommodate.
We are pleased by the growing excitement about our ÄPRE REVEAL™ software. Its backward compatibility with MetroPro® file types and unique traceable metrology make it the production software of choice.
Also several other exhibitors displayed products run by REVEAL. Davidson Optronics again displayed their 12″ Fizeau interferometer, designed in concert with Äpre Instruments, along with the PSM micro-profiler both using REVEAL. M3 displayed their new 3.39um IR interferometer using REVEAL software.
See you in Frankfurt at Optatec 2016.®™
In this blog measurement of optics in a harsh environment with a Fizeau interferometer is discussed.
For large systems, typically telescopes, vibration and air turbulence hinder or prevent the measurement phase by temporal phase shifting. Also interferometers placed on machine tools to measure in situ experience a vibrating environment. When vibration and turbulence hinder measurement then only a simultaneous phase measuring system (SPMI) will be able to acquire data. These systems acquire phase data fast enough to freeze fringe motion due to vibration and turbulence.
SPMI Data Acquisition: Multi-Camera and Carrier Fringe
There are two primary SPMI data acquisition architectures: Multi-camera1and carrier fringe2. Multi-camera uses polarization to split the intensity data into multiple images with shifted phases which are analyzed for wavefront phase. Carrier fringe uses tilt in the wavefront coupled with several different analytical approaches to extract phase. Both approaches are successfully employed commercially, and are functionally and performance equivalent.
Tower for testing large mirrors at the University of Arizona
Averaging is Required
The SPMI system enables phase to be acquired, but the phase is changing rapidly and by large amounts and any single measurement is meaningless. To achieve stable data, averaging must be employed. The amount of averaging required is a function of the frequency and amplitude of the vibration and turbulence. A useful method to determine how much averaging is required is to acquire 100 data sets in a series as would be performed in an average. Calculate the RMS or P-V of this data set, divide the RMS or P-V by the measurement repeatability desired to obtain a ratio. Square this ratio and set the average to this squared value. For example, if the single measurement repeatability is 6,000 nm P-V and desired is 60 nm P-V then 1002 averages must be taken, at a minimum, to achieve 60 nm P-V repeatability, assuming a gaussian distribution. It is often practical to stir the air with a fan to improve convergence, which can take many hours for large cavities with slowly moving fringes. SPMI systems can often acquire and calculate phase in seconds so averaging can be rapid.
Repeatability is Not Accuracy
Finally, note that repeatability is not low measurement uncertainty, or accuracy. Measurement uncertainty is primarily driven by the optical design of the interferometer, temperature variations in all the optics, mechanical stresses in mountings and optical misalignments and null lenses errors – a la Hubble. Controlling these is much harder than averaging and is a topic unto itself.
SPMI Interferometers are Non-Common Path – Hence Lower Accuracy
Also note SPMI systems are non-common path systems – the polarization paths are different or tilt exists between the test and reference wavefronts. These differing paths degrade the optical performance compared to PMI which can be common path, i.e. the test and reference beams perfectly overlap when a sphere or flat is measured in a nulled condition. So from an accuracy point of view PMI- nulled can outperform SPMI, but when data cannot be acquired due to turbulence or vibration then SPMI is required and an accuracy compromise is acceptable.
Summary
Acquiring data in harsh, vibrating and turbulent environments requires an SPMI data acquisition interferometer. Achieving high accuracy results requires careful attention to the all measurement parameters and is typically of lower accuracy than a nulled laser Fizeau phase shifting interferometer in a quiet environment.
2 Takeda, M. “Spatial-carrier fringe-patter analysis and its applications to precision interferometry and profilometry: an overview, Ind Metrol 1990;1(2):79-99
In this blog the measurement of spherical and flat optics with a Fizeau interferometer that have been spot polished is discussed.
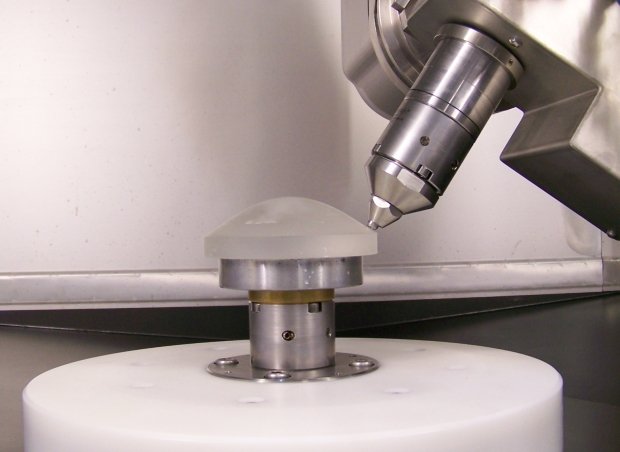
Spot polishers require improved performance over interferometers with standard 6X continuous zoom imaging
Spot polishing machines for rapid manufacture of standard and high accuracy spheres place new requirements on interferometer systems. The spot polishing method can create small ripple in the surface while shaping the overall form. Accurate positioning of the polishing spot is required to correct the surface errors to bring the surface into specification. To guide the spot polishers image distortion, resolution, and pixel scaling (calibration) are important These requirements primarily drive the imaging system of the interferometer. Continuous zoom system do not meet these requirements.
Modern Imaging Systems
Modern interferometers have discrete or fixed magnification imaging to improve resolution, and minimize distortion and ray tracing errors. All the interferometer optics are exposed to coherent laser light which highlights surface defects. Therefore the optics must be high quality to supress bulls eye artifacts (stray fringes) from scratches, pits, dust and reflections. These hight quality optics increase the system cost.
Interferometer Image Resolution
Increased resolution is required to measure mid-spatial frequency surface features. These features can be defined as the residuals present after the removal of 36 Zernike polynomial terms (see REVEAL analysis screen below, the image on the right are the residual mid-spatial frequencies). Mid-spatial frequencies in an optical surface scatters light degrading the image or lowers directed energy concentration. Therefore they must be measured and corrected.
Mid-spatial frequencies are measured with a high resolution imaging system. Typically greater than a megapixel camera is required. The resolution is limited by either the optical design or the camera resolution. If the camera limits then the smallest feature measurable is approximated by 80% of Nyquist frequency
(1-line/mm:2 Pixels), or ~400 lines/aperture for a megapixel camera. At 50 mm field of view, approximately 125 µm feature can be imaged. Continuous zoom interferometers are limited to <100 lines/aperture.
Interferometer Image Distortion
Image distortion maps a surface feature in the wrong position, and the polisher will move to the wrong position. In the best systems the camera limits resolution. As noted 400 lines/aperture is the practical limit of resolution in a megapixel camera, so distortion of 1/400 or 0.25% is required. The polishers polishing function might decrease this requirement, but with 0.25% the interferometer will not be the limiter. For higher resolution cameras the 80% Nyquist again drives distortion… more pixels better distortion requirements, yet practically the polishing function (the shape of the polishing spot) is the limiter. Continuous zoom systems can exhibit up to 2% distortion – 10X higher than modern interferometers.
Interferometer Ray Tracing Errors
When the test part deviates from a sphere many fringes are seen. These fringes indicate high slopes between the reference and test wavefronts. When high slopes occur the test and reference wavefronts traverse different paths through the imaging optics. These divergent paths create wavefront errors in an uncorrected interferometer system. This error can be measured by acquiring data with a null interference cavity, saving the data and then acquiring data with the maximum number of tilt fringes that can be measured and subtracting the two results. The residual error will primarily be due to ray tracing errors and is seen as coma and astigmatism, and sometime spherical aberration. In the old continuous zoom systems thes
e errors can be as large as a wave of error. Even for the small amount of slopes they can measure.
To speed the convergence of the polishing correction process minimizing these ray tracing errors are required. Only the highest quality systems are corrected for ray-trace errors.
Summary
For spot polishing of spherical and flat components a low distortion, high resolution interferometer with low ray trace errors is desired.
Next Post: Next we discuss special applications, starting with Harsh environments
In this blog the alignment of optical systems with a Fizeau interferometer is discussed.
The goal of a system wavefront test is alignment and confirmation of system performance. The measurement of optical system wavefront often requires a custom interferometer. When a fully reflective system is measured a standard HeNe laser Fizeau is sufficient as the wavelength does not matter. For refractive systems the wavelength often must match the optical system design, and optical system wavelengths vary from 10.6 um to 193 nm. Thus these systems are often “custom” except for a few wavelengths that are more common. For this discussion the wavelength is assumed to be matched to the system.
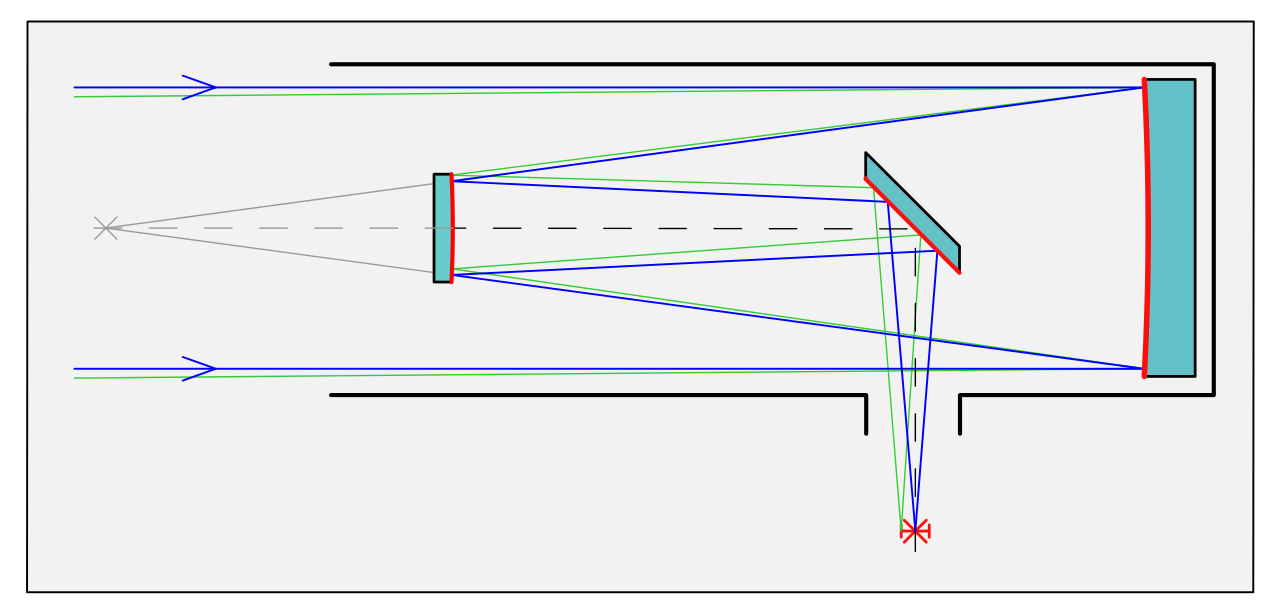
Zernike polynomials are often used to define system wavefront errors during alignment
Null Test
If a null, adjust until near-zero error is the goal then a standard continuous zoom system can be sufficient. At null ray trace errors are minimized and wavefront imaging distortion error minimal. Further mid-spatial frequency errors are not critical when measuring system alignment. Some of these measurements are made with a null corrector lens that matches the system under test wavefront with the interferometer expected wavefront, either spherical or plano.
Non-Null Testing
Subsystem testing can produce non-null wavefronts in the final alignment. For non-null system an interferometer with low ray-trace errors is important. With high fringe density, or high slopes, ray trace errors grow. Ray-trace errors are developed when the test and reference wavefront traverse diverging paths to the camera and are seen primarily as coma and astigmatism, with sometimes spherical errors. If the final “aligned” condition is at 10 waves of spherical aberration then unless the interferometer is well corrected for ray-tracing errors the data will exhibit errors in final alignment.
Precision alignment is important for optimal optical system performance, especially with more complex optical paths.
Small systems
A bench top system test is similar to measuring an optical component and standard phase shifting data acquisition is sufficient.
Real Time Adjustment
Recently the introduction of widely available simultaneous data acquisition interferometers have enabled near real time phase. So alignments can be adjusted continuously for more rapid convergence on alignment.
Large Systems
For large systems, typically telescopes, vibration and turbulence become an issue. If an issue then only a simultaneous phase measuring system will be able to acquire data.
Summary
In most cases a standard interferometer with near matching wavelength is sufficient to test optical system wavefront. Where large or non-nulled cavities are involved a high performance interferometer with low ray-trace errors and/or simultaneous phase measurement need to be used.